小狮博客
联系我们
联系我们
当前位置:
小狮博客
>
技术专栏
>
正文
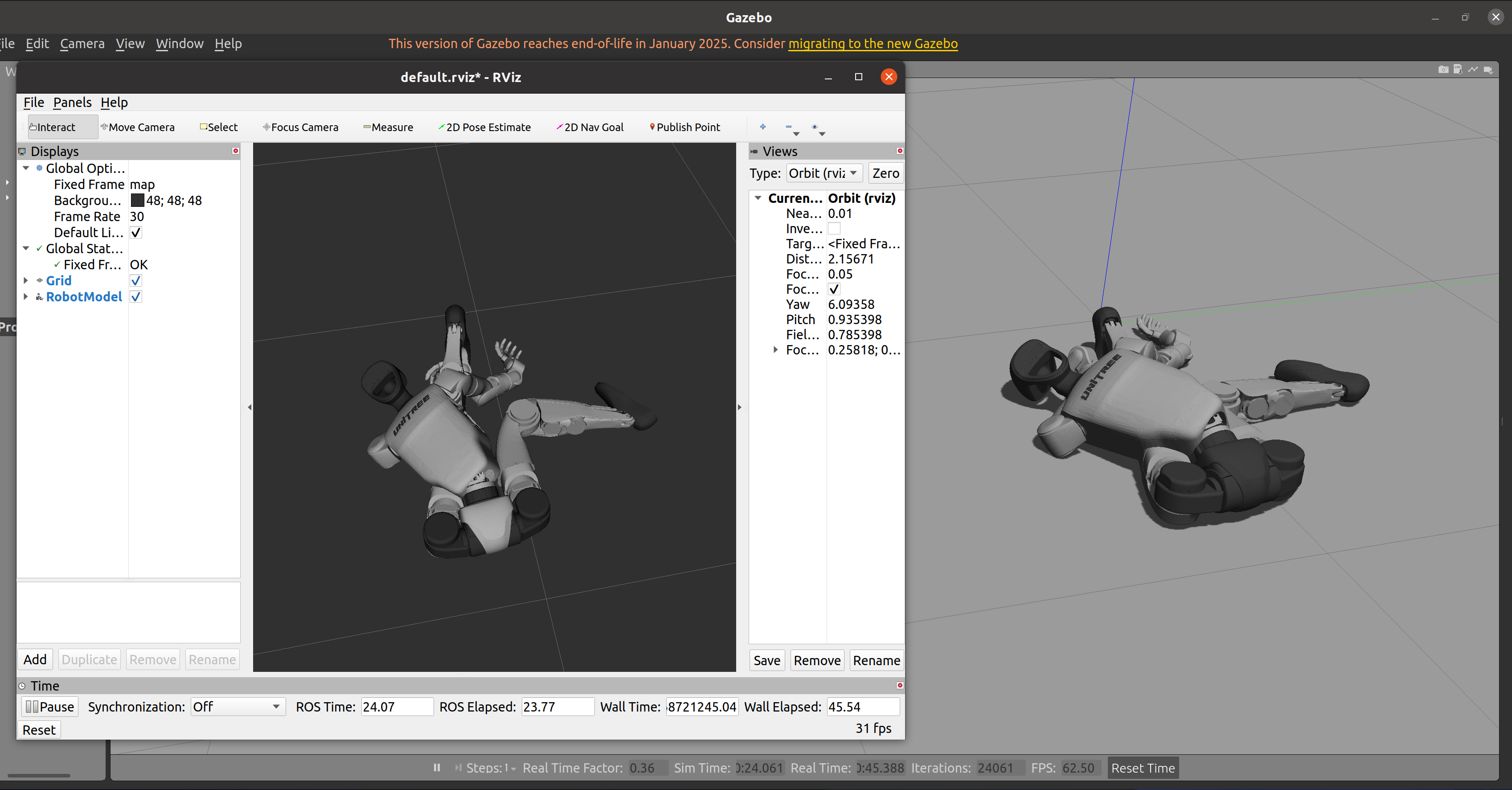
ROS1 noetic 中将 Unitree G1 基于 Gazebo/RViz 关节联动【基于 Gazebo 状态反馈】
2026-01-23
分类:
技术专栏
阅读(244)
评论(0)
赞(
0
)
未经允许不得转载:
小狮博客
»
ROS1 noetic 中将 Unitree G1 基于 Gazebo/RViz 关节联动【基于 Gazebo 状态反馈】
分享到:
更多
(
0
)
上一篇
Java泛型—桥方法
下一篇
打破堆积困局:优化堆积条形图的对比效果
相关推荐
一天一个Python库:charset-normalizer – 自动化字符编码检测与规范化
如何使用Opencode高效的创建属于自己的技能
从DEM到三维地形:用PLY、OBJ、glTF构建GIS可视化模型
2026 年,macbook air 2015 升级硬盘注意事项
STM32之控制变量与函数的存储位置
一天一个Python库:setuptools – 轻松构建和分发Python包
构建基于 cc-switch 与 sdcb/chats 的AI 编程基础设施
Python 学习笔记:学习路线图规划
联系我们
回顶
回顶部